坐标系转换
激光点云坐标转到世界坐标系
首先明确,订阅激光topic得到的坐标是lidar坐标系下的;
车辆定位 localization 数据格式是geometry_msgs/TransformStamped,他是有[x, y, z, qx, qy, qz, qw]的,当只取坐标(x, y, z)时,这个坐标是在世界坐标系下的,当取pose[x, y, z, qx, qy, qz, qw]时,这其实应该叫变换,即 TF 了,这个 TF 就是车辆坐标系到世界坐标系的变换(localization 在Apollo里面时融合了 GPS和IMU 数据,再转化到世界坐标系下的,所以这个TF是已知的)。
激光点云坐标转到世界坐标系,首先要转到车辆坐标系,再转到世界坐标系,所以有两个变换,lidar坐标系->车辆坐标系,记为 T_vl,车辆坐标系->世界坐标系,记为 T_wv。
激光点云在世界坐标系下记为 P_w,在lidar坐标系下记为 P_l
那么计算公式为P_w = T_wv * T_vl * P_l
其中 P_l 和 T_wv 是已知的,能分别从激光和 localization 的topic获得,T_vl 是求出来的,可以参考之前做激光和imu标定的lidar_align。
// 已知条件:
// inss为订阅的localization数据
// lidar2inss_vector为求出的lidar到车辆的变换[x, y, z, qx, qy, qz, qw]
// 注意Eigen::Quaterniond是qw在第一个
pcl::PointXYZI Fusion::get_global_pos(pcl::PointXYZI& pos) {
pcl::PointXYZI res;
Eigen::Quaterniond q_w2i(
inss.transform.rotation.w, inss.transform.rotation.x,
inss.transform.rotation.y, inss.transform.rotation.z),
q_i2l(lidar2inss_vector[6], lidar2inss_vector[3], lidar2inss_vector[4],
lidar2inss_vector[5]);
q_w2i.normalize(); // 归一化
q_i2l.normalize();
Eigen::Vector3d t_w2i(inss.transform.translation.x,
inss.transform.translation.y,
inss.transform.translation.z),
t_i2l(lidar2inss_vector[0], lidar2inss_vector[1], lidar2inss_vector[2]);
Eigen::Vector3d p_l(pos.x, pos.y, pos.z);
Eigen::Isometry3d T_w2i(q_w2i), T_i2l(q_i2l);
T_w2i.pretranslate(t_w2i);
T_i2l.pretranslate(t_i2l);
Eigen::Vector3d p_l_w = T_w2i * T_i2l * p_l;
// std::cout << p_l_w.transpose() << std::endl;
res.x = p_l_w[0];
res.y = p_l_w[1];
res.z = p_l_w[2];
res.intensity = pos.intensity;
return res;
}
坐标系之间简单变换
如图,假设在lidar坐标系有一个点,坐标值为 P1(2,-1,0),怎么知道该点 P1 在另一个imu坐标系中的坐标��值 P2 呢?

目前条件是,已知lidar坐标系下点 P为(2,-1,0),求点 P 在imu坐标系下的坐标
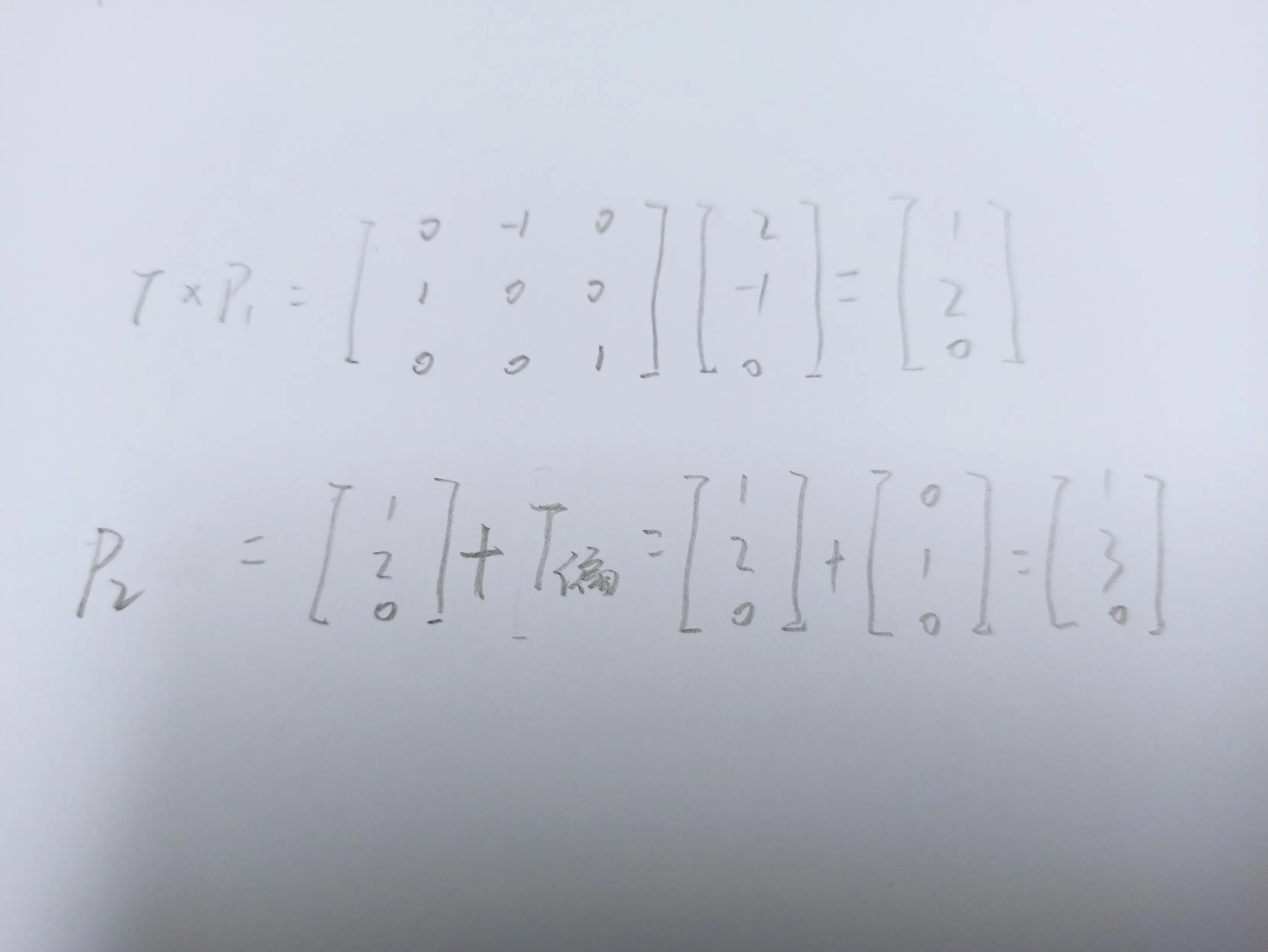
首先,将lidar坐标系旋转到imu坐标系,顺时针旋转90°,
绕Z轴顺时针旋转的旋转矩阵是T=[cosA,-sinA,0; sinA,cosA, 0; 0,0,1]
所以旋转矩阵 T 为[0,-1,0; 1,0,0; 0,0,1]
所以T*P1+T偏移=P2
参考: